
Eco-Dolphin
Inspired by nature, for nature
Why we created?:
Every vacation we take, every documentary we watch gives us glimpses to appreciate our relationship with environment with the joy and tranquility it can evoke in us. We also frequently get exposed to images of environmental degradation. Whether it is large batches of deforested or eroded land, or wildlife choking on plastics the size and scale of the problem can make anyone feel powerless. We thought different. We wanted to take our individual contributions one step further and make a contribution to the awareness of both children and adults towards the environment while simultaneously demonstrating an approach that would reestablish our sense of reasonable hope and self efficacy that yes we can help the environment and clean up after ourselves. Eco-Dolphin was designed as an autonomous robot that cleans the sea surface. By the help of this robot, we aimed to remove accumulated plastic bottles, tin and oil wastes from shipyards, marinas and shorelines.
How we created?:
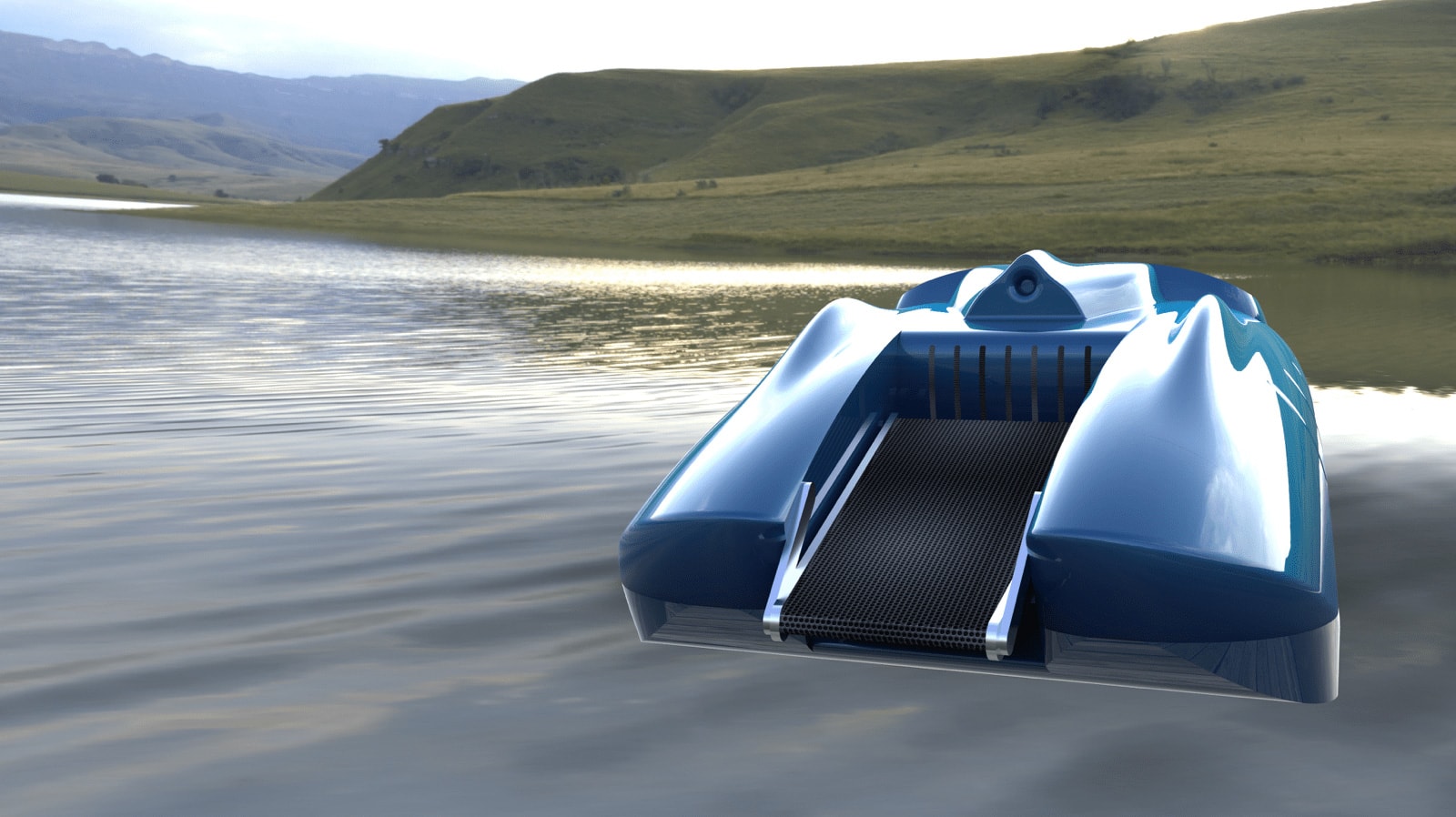
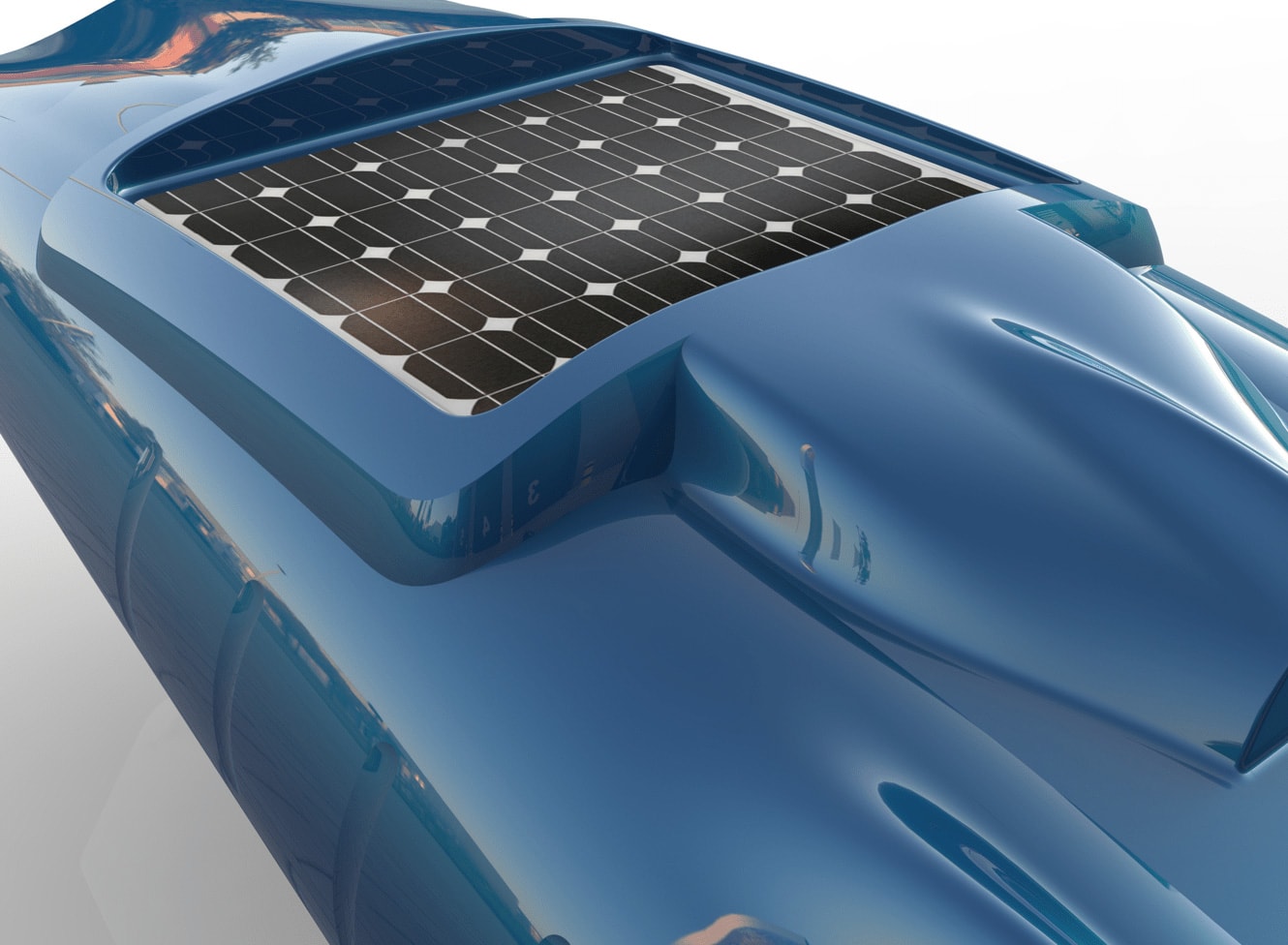
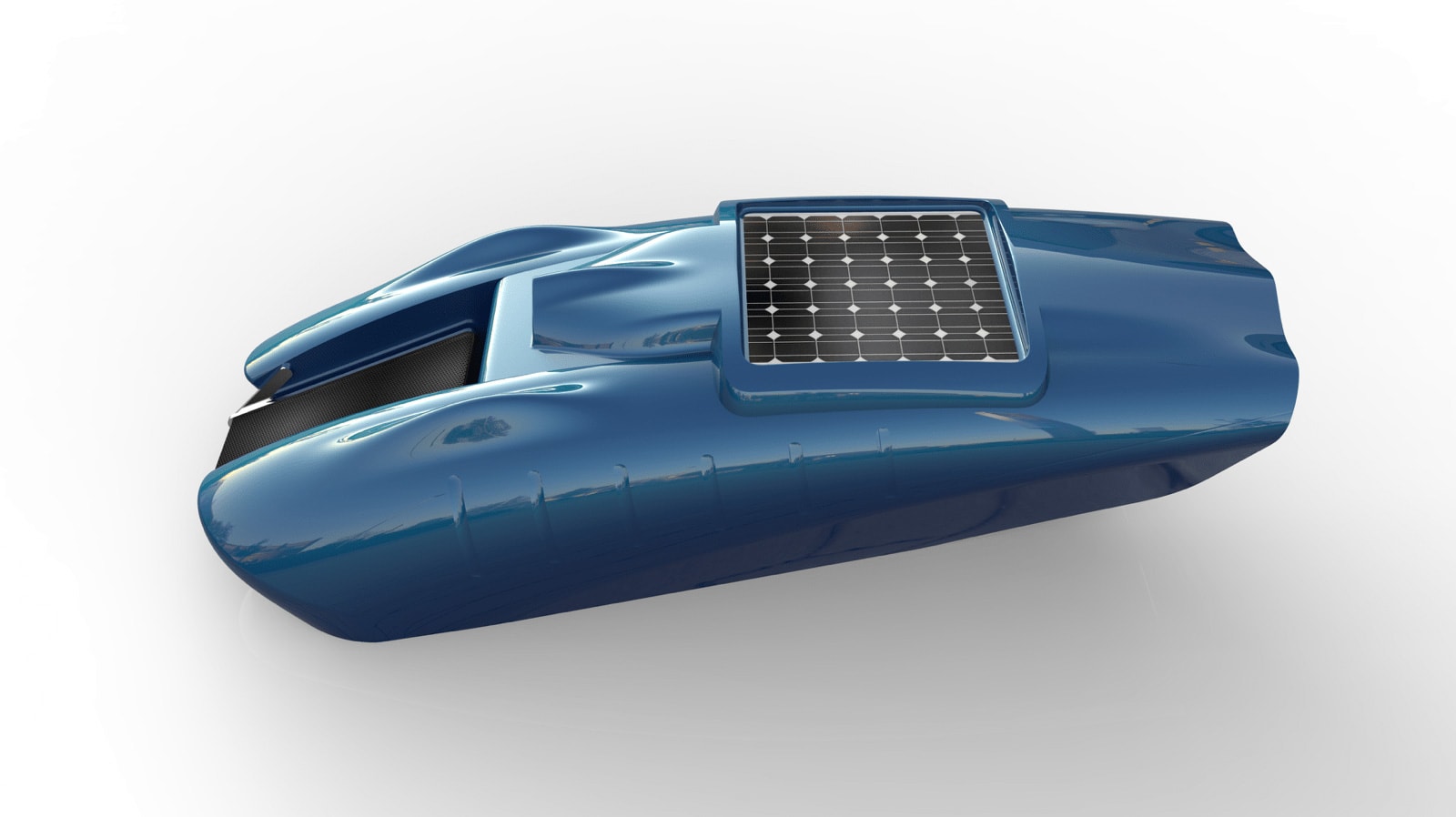
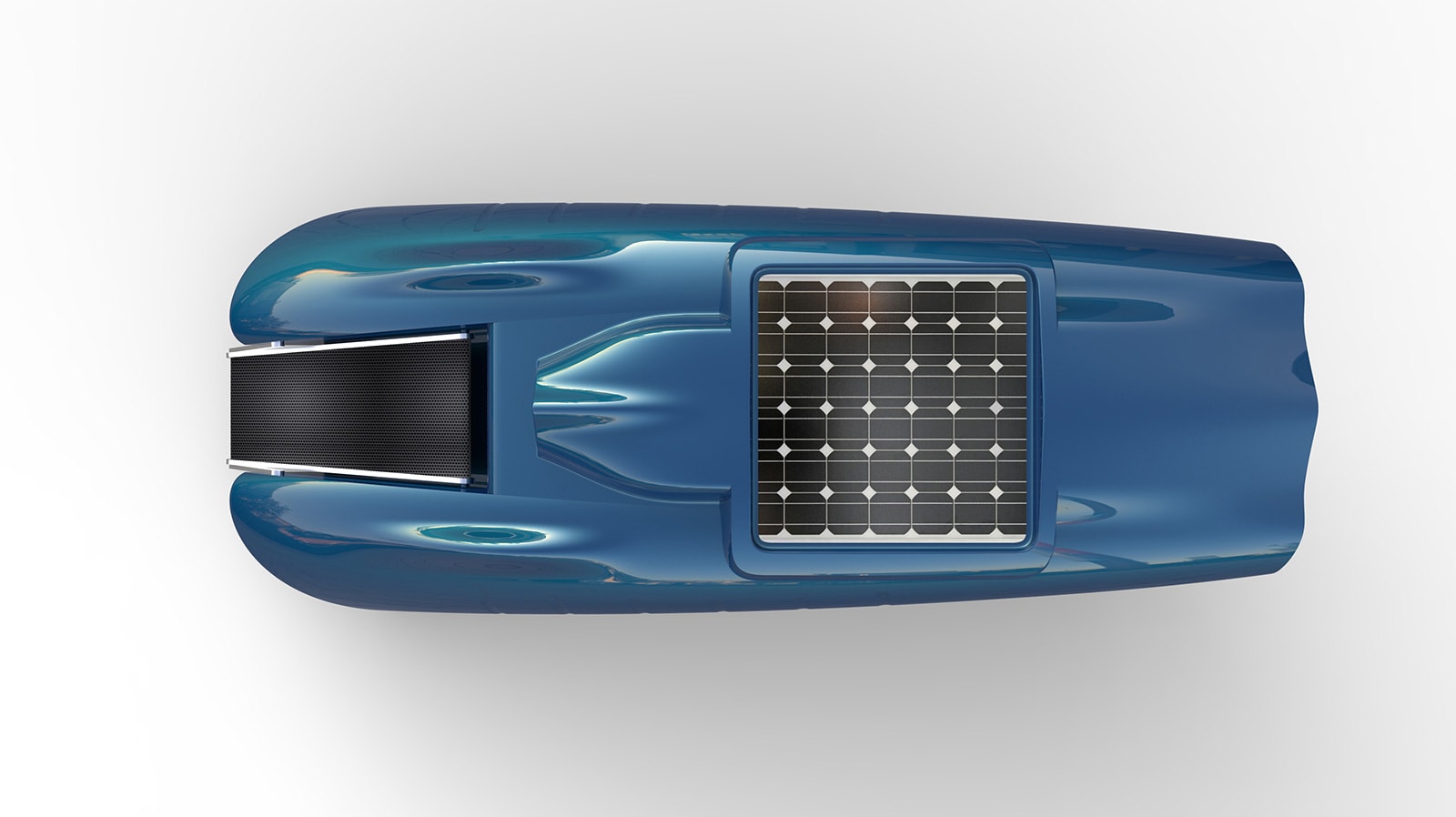
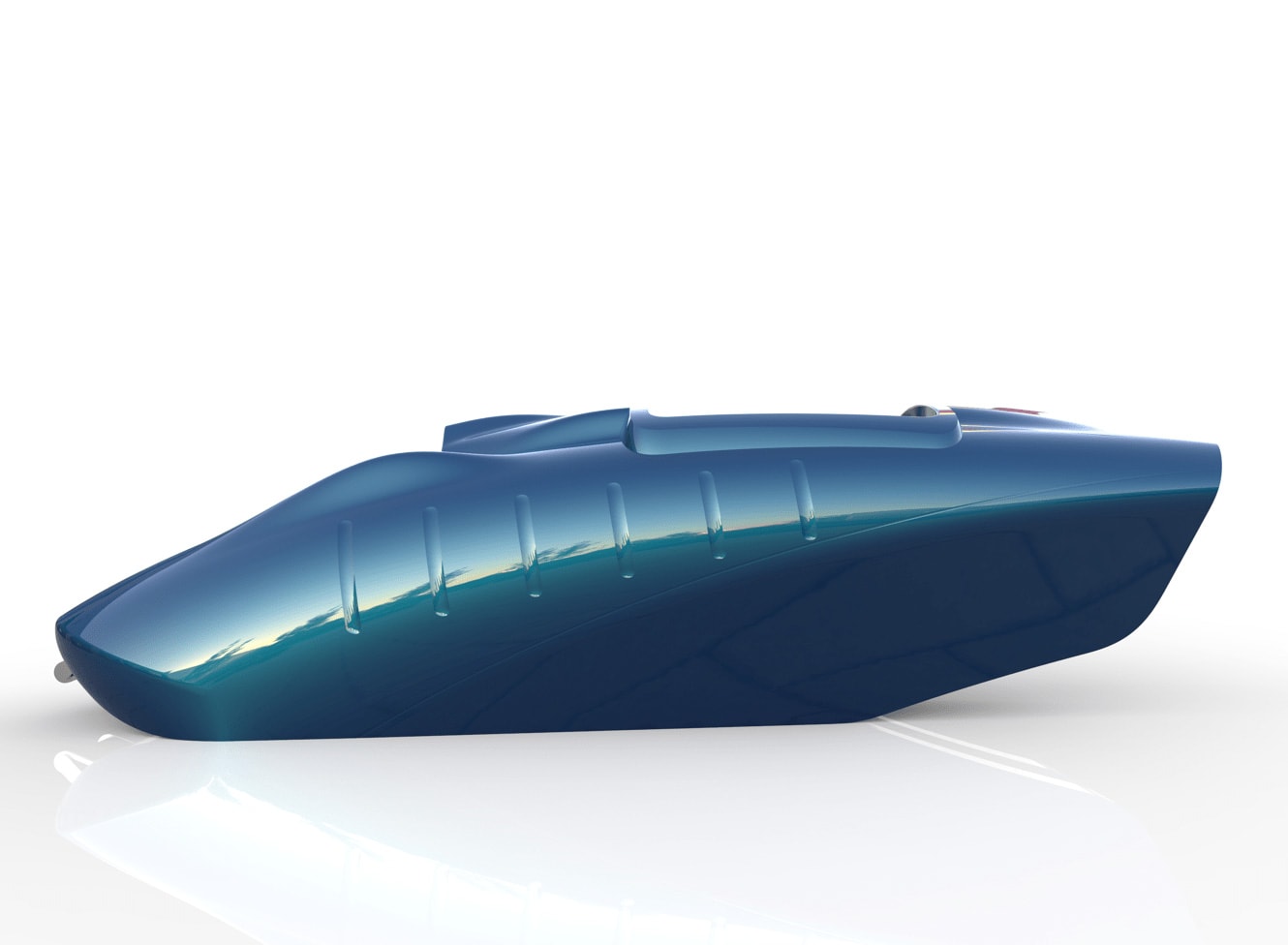
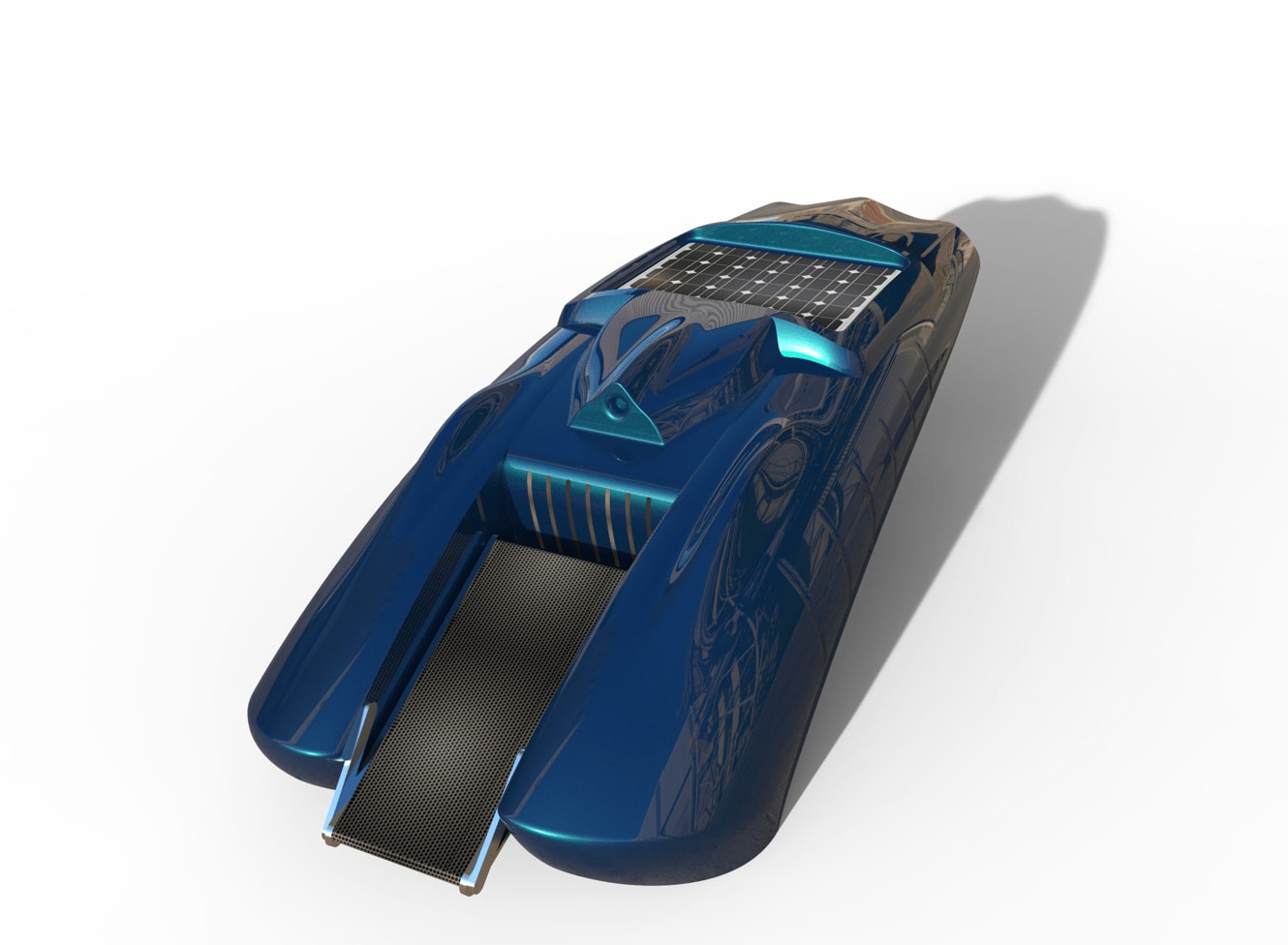
We conceived the eco dolphin as a buoyant robot, propelled by its internal engine powered by a solar-charged battery. The lower segment of the robot was designed in the image of a catamaran for sustained stability in turbulent waters with an upper shell built in the silhouette of a dolphin. The buoyancy factor provided by the air filled carbon-fiber chamber below made it crash and vortex resistant and easily rescued. In the event another vessel were to crash into it the robot could turn off its engine and float with the wake of a vessel, stay atop any artificial or natural vortexes and easily hauled by a rescue boat without complete removal from water. Once the hard shell and casing of the robot was designed it was time to get into the nitty gritty details of the cleaning, separating and compacting functions.
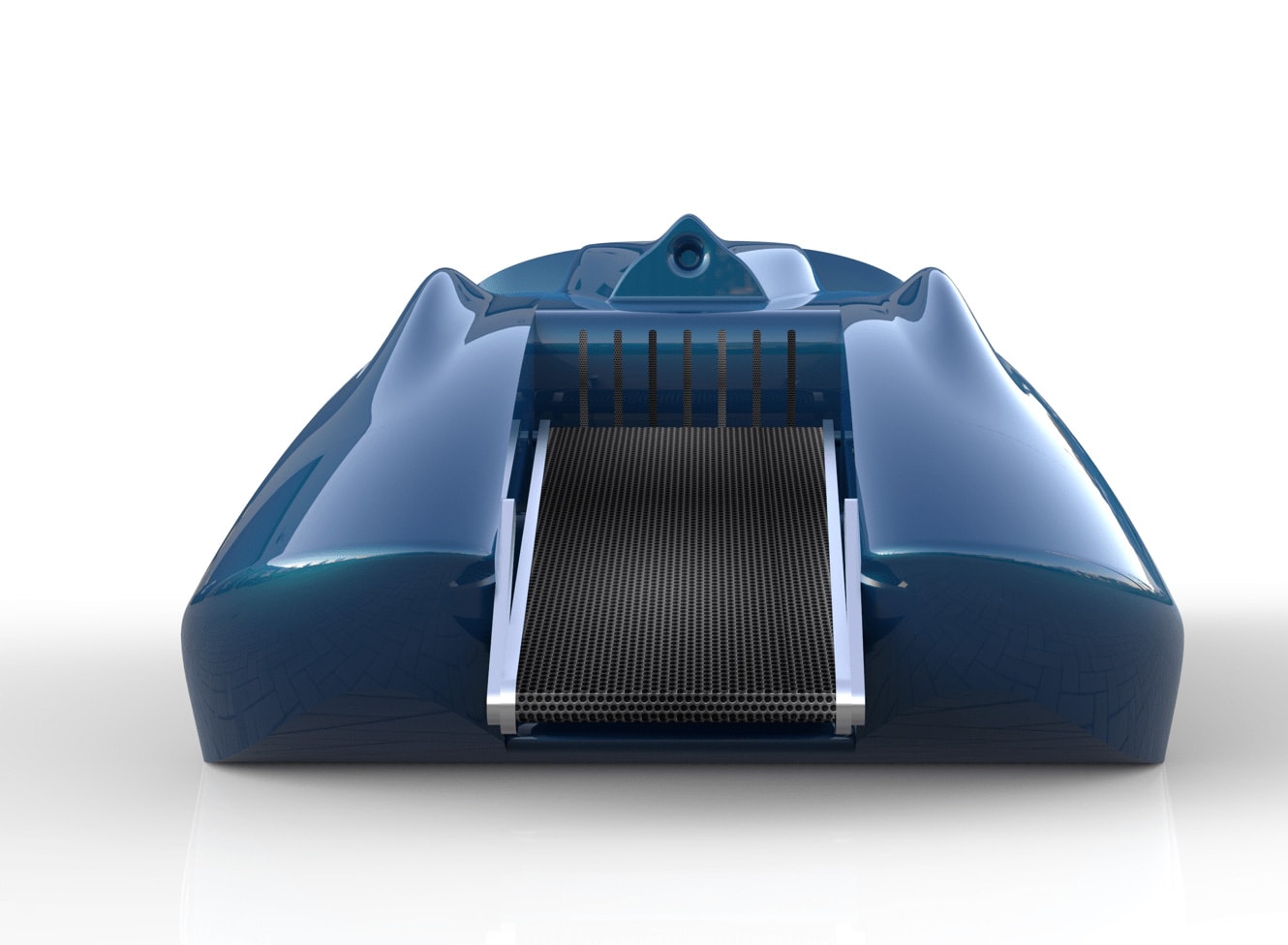
The removal of waste from the surface was to be accomplished by a rolling pad that would descend and submerge partially to water rolling up wastes from the front of the dolphin to reception chamber. For liquid wastes a pipette would extend out to the surface and submerge only by half a centimeter. Once in the reception chamber the waste would be separated by a filter first then tests of conductivity, capacitance, magnetic properties and segregated to 3 different containment chambers, that have a proprietary compacting technology suitable with the waste management solutions available on land.
GPS equipped, the dolphin was designed to return to home base when the chambers were filled, and until then the dolphin would float about collecting waste until chambers are filled. It was also a latter but very effective addition to include a lab module to the dolphin, that could collect information about the quality of the water independent of the collection capacity present in the dolphin.